A pneumatikus automatika elemek széleskörű alkalmazása változatos megoldásokat biztosítanak a célgép tervezők számára. A megoldandó technológiai feladatok egyik fontos eleme a gyors, dinamikus lineáris pozícionálás, ahol a pneumatikus mozgatások csak korlátozott lehetőségeket biztosítanak. Ezekben az esetekben előnyösen alkalmazhatók a lineáris motorok, amelyek széleskörű alkalmazást és gyors, számítógéppel támogatott tervezést és üzembe helyezést kínálnak. A cikkünkben lineáris motorok jellemző alkalmazási lehetőségeit mutatjuk be.

Figyelembe véve a mozgatandó tömeg nagyságát, a megkövetelt sebességet, gyorsulást és pontosságot, a pneumatikus hajtások csak korlátozott megoldási lehetőségeket biztosítanak. Különös tekintettel a élelmiszeripar, gyógyszeripari, textilipari, csomagológép gyártás, szerelő és kiszolgáló rendszerek területén a hajtásoktól ma már lényegesen nagyobb dinamikát és pontosságot várnak el a felhasználók, növelve ezzel a berendezések hatékonyságát és növelve a gyártmányok minőségét. Ezekre a feladatokra kiválóan alkalmazhatók a Norgren MPAC lineáris motorok, amelyek az egyenes vonalú mozgatást közvetlenül, egyéb közlőmű, vagy áttétel nélkül valósítják meg.
A lineáris motorok felépítése 

A lineáris motorok valójában állandógerjesztésű kétfázisú szinkronmotorok. Alapvetően két részből, egy álló és egy mozgó részből állnak, bár mint a későbbiekben látni fogjuk ez csak egy relatív megfogalmazás. Az állórész foglalja magában a kétfázisú tekercselést, a csapágyazást, a pozícióérzékelőt és a tekercsbe épített hőmérséklet-érzékelőt, mindez egy masszív, IP67 védettségű, acélházba integrálva. A mozgórész egy krómacél rúd, amelybe kerül elhelyezésre a mágnes. A rúd mindkét végén a kapcsolódó szerkezetek rögzítésére két belső furat áll rendelkezésre. (1.sz. ábra) Az álló és mozgórész között semmilyen mechanikus, vagy elektromos kapcsolat nincs. A mozgórész pozícióját az állórészbe integrált, érintésmentes mágneses érzékelő határozza meg. A lineáris motor egy 9-pólusú kábelen keresztül kapcsolódik a szerverősítőhöz Út-erő diagramm, elektromos és mechanikai jellemzők.
A lineáris motorok út-erő diagrammja eltér a hagyományos forgó szervomotorok jelleggörbéjétől. Mint a 2.sz. ábrán látható, a görbe jellemző pontja az u.n. "zéró" pont (ZP), amely a lineáris motor löketének kb. felénél található. Ehhez a ponthoz képest az út-erő jelleggörbe szimmetrikus, ezen belül is egy adott szakaszon belül (SS) a motor által kifejtett erő állandó az elmozdulás mentén. Ezen a szakaszon kívül az erőhatás lineárisan csökken. A motor által kifejtett erő, egyebek között, a motorra kapcsolt feszültségtől (24-48-72 V,DC) függ, ami gyakorlatilag a jelleggörbe ‡függőleges“ irányú eltolását jelenti. Nagyobb kapocsfeszültség esetén nagyobb erő és dinamika érhető el a motorokkal. A lineáris motorok és szervoerősítők kivitelétől, valamint az alkalmazástól függően az elérhető maximális sebesség 2,5 m/s, a legnagyobb gyorsulás 55 m/s lehet és a csúcserő elérheti az 580 N-t, mindezt közel 1500 mm-es úthosszon. A hajtások további fontos jellemzője a pontosság, ami a lineáris motorok esetében ± 0,1 mm alapkivitelben, de külső jeladó használata esetén a pontosság ± 0,01 mm-es tartományig növelhető.
A lineáris motorok szabályozása
A lineáris motorok vezérlése leginkább a szervomotorok vezérléséhez hasonlítható. A leggyakoribb alkalmazás a pozícionálás, amikor az úthossz mentén több, szabadon programozható pozíciót kell elvenni. A másik, a villamos hajtásoknál előforduló igény egy állandó nyomaték tartása (áramvezérlés), ami a lineáris motorok esetében állandó erőszabályozást jelent.
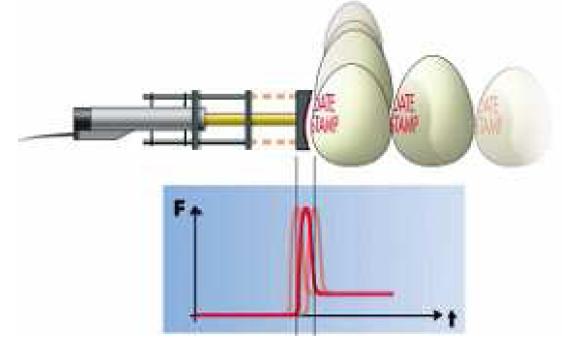
Természetesen egy adott cikluson belül ezek vegyes szabályozásáról is beszélhetünk. A 3.sz. ábra szemlélteti a fent említett szabályozási módok kombinációját. A lineáris motorral működtetett egység az egymástól méretben különböző, ez esetben tojások bélyegzését végzi. A nagy ciklusszám elérése érdekében a megközelítés és visszajáratás rendkívül gyorsan, pozíciószabályozással történik, míg bélyegzést megelőző rövid szakaszon a lineáris motor egy előre programozott erő elérését követően megkezdi a visszajáratást, így a közelítés szakaszban a tojás (munkadarab) méretétől függetlenül mindig ugyanazzal az erővel végezzük a műveletet.
Mechanikai kivitel, beépíthetőség
Noha az állórészbe beépített siklócsapágy biztosítja a mozgórész alapmegvezetését, az esetek döntőtöbbségében a terheléstől függően a motorokat külső megvezetéssel kell ellátni. Ez lehet a gépszerkezet egy mechanikai eleme, de kisebb löketek esetén a pneumatikus hengereknél megismert H-vezetékek változtatás nélkül alkalmazhatók. A lineáris motorok IP67-es védettséggel rendelkeznek. A mechanikai kiviteltől függően, így pl. a nehézüzemi (Heavy œDuty) kivitel esetén a mozgórész titán bevonatának köszönhetően előnyösen alkalmazható szennyezett, abrazív, agresszív környezetben, vagy gyors mozgásoknál, ahol a működési frekvencia nagyobb, mint 5 Hz. A lineáris motor, vagy a mozgatandó teher rögzítésére további beépíthetési lehetőséget biztosítanak a mozgórész végein található belső menetes furatok, vagy az állórészre építhető profilszerű rögzítőelemek. A motor állórészére szerelt rögzítőelemek adapterlapokon keresztül történő összeszerelésével gyorsan és egyszerűen építhetők többtengelyes manipulátorok, kiszolgáló egységek. A rögzítőelemekre épített ventillátorok használatával a csúcserő jelentősen növelhető. A bevezetőben említettük, hogy az álló-és mozgórész megnevezés viszonylagos, hiszen a motor sajátosságából adódóan minden további nélkül lehetséges, hogy a rögzített mozgórészen az állórész mozduljon el. Ebben az esetben a kábelezés egy hajlékony kábelbevezetőn keresztül oldható meg. Szükség esetén a rögzített mozgórészre két állórész is felszerelhető, amelyek egymástól független mozgást végezhetnek, megkönnyítve a kis munkaterek gyors kiszolgálását.

![]()
A lineáris motor felépítéséből adódó egy másik érdekes beépítési lehetőség, amikor a motor lineáris mozgása közben a mozgórészt egy külső eszközzel forgatjuk, így egy adott sebességű, vagy erejű "előtolás“ mellett végezhetünk forgatást, pl. részegységek becsavarását (csavar, kupak stb.). Gyakran előforduló feladat, hogy megbizonyosodjunk egy részegység pontos behelyezéséről. Sok esetben az ilyen ellenőrzésekre kamerás rendszereket használnak. A munkadarabok pontos pozícionálása gyakran vezethető vissza egy adott pozíció, vagy ütközési erő mértékének mérésére, amelyre a lineáris motorok ill. azok vezérlései kiválóan alkalmasak. További alkalmazási lehetőség a pneumatikus hengereknél már megismert üreges dugattyúrúd ill. mozgórész, ahol a tengely furatán keresztül vákuum, vagy egyéb közeg vezethető át.
Szervoerősítők

A lineáris motorok szabályzói teljes úthossz mentén max. 8 pozíciót kell felvenni. A felvett pozíciókat a mozgatás sebességével és még néhány egyéb paraméterrel együtt a szervoerősítőben tároljuk, majd az adott pozíciót a berendezés vezérlésének, leggyakrabban egy PLC-s vezérlés 8 digitális kimenetén keresztül kiválasztjuk. A pozícióba érkezést a szervoerősítő a rendszervezérlés számára ugyancsak 8 digitális kimenetén keresztül visszajelzi. A korábbiakban említett erőszabályozás valamennyi pozícióban lehetséges és a beállított elérését a szervoerősítő digitális kimenetén keresztül szintén jelzi a vezérlés számára. Joggal merül fel a kérdés: de mi történik, ha a szükséges pozíciók száma meghaladja a 8-at ? Természetesen lehetőség van olyan szervoerősítő kiválasztására, ahol az említett 8 digitális ponton keresztül 64, vagy akár 256 pozíció, vagy erő kiválasztható, különféle gyorsulási és sebesség értékek mellett. A mai gépvezérlések alapvető követelménye, hogy egységei egy buszvezérlésen keresztül is kapcsolódhassanak egy felsőszintű vezérléshez. A lineáris motorok szervoerősítői lehetőséget biztosítanak a buszrendszerekhez (Profibus-DP, DeviceNet) való csatlakozásra, ilyen módon több lineáris motor egymáshoz, vagy egy mester kódadó jeléhez történő szinkronizálására, pl. olyan rugalmas gyártósorok esetén, ahol a termékváltás esetén a gyártósor részegységeinek a sebességét is meg kell változtatni. A módosítás a vezérlőprogramon keresztül egyszerűen és gyorsan, a mechanikai részek cseréje, vagy módosítása nélkül biztonságosan elvégezhető, csökkentve az átállás idejét és jelentősen növelve e gyártósor hatékonyságát.
Tervezés, kiválasztás, üzembe helyezés
A lineáris motorok kiválasztását, a berendezések méretezését és nem utolsó sorban az üzembe helyezést számos számítógépes program segíti. A tervezendő lineáris hajtás főbb paraméterei, mint a kívánt úthossz és szükséges erő alapján előzetesen kiválasztható egy lineáris motor. A motor terhelhetőségének ellenőrzésére szolgáló szofverben be kell állítani a kiválasztott motor típusát, a vezérlés jellemzőit (tápfeszültség, szervoerősítő típus), a lineáris motor beépítési helyzetére és terhelésére vonatkozó adatokat és legvégül kívánt mozgási ciklusok paramétereit (pozíció, mozgási idő). Ezen paraméterek alapján a szoftver meghatározza a motor kihasználtságára vonatkozó értékeket, amelyeket a katalógusadatokkal összehasonlítva eldönthető, hogy a kiválasztott lineáris motor a feladatra várhatóan alkalmas lesz-e.
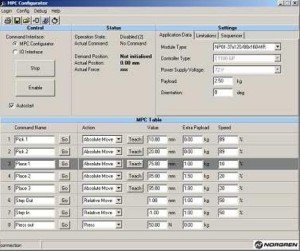
A gyártóberendezésekbe épített lineáris motorok akár helyszíni üzembe helyezése szintén egy egyszerűen kezelhető szoftveren keresztül elvégezhető. A szervoerősítőhöz RS 232C porton keresztül csatlakoztatott számítógépen futó szoftver egy Windows® alkalmazás, ahol a képernyőn keresztül beállítható a kívánt erő, vagy pozíció abszolút, vagy relatív értékben, a kívánt sebesség a maximális sebesség százalékában, majd a beállított paraméterek szintén a képernyőn keresztül az egérrel kiválaszthatók és ezzel a kívánt mozgások egyesével, vagy akár szekvenciába szerkesztve ellenőrizhetők és szükség szerint módosíthatók. A pontos helyszíni beállításra szolgál az u.n. "Teach-in“ üzemmód, ahol a beállított pozíció értéke a szoftveren keresztül közvetlenül módosítható.
A sikeres beállítás és ellenőrzés után a szervoerősítő a szoftveren keresztül átkapcsolható a külsővezérlőeszközre (PLC, ipari vezérlő) és ezzel a lineáris motor közvetlen üzembehelyezése megtörtént. A beállított paraméterek eltárolhatók, így a hajtásrendszer elemeinek cseréje, vagy újabb, hasonló berendezések üzembe helyezés esetén a korábbi paraméterek a szervoerősítőbe letölthetők, jelentősen lerövidítve az átállás ill. beüzemelés idejét. Bár a bevezetőben a pozicionálások azon területeire ajánlottuk a lineáris motorokat, ahol a pneumatikus pozicionálással nem lehet kielégíteni a pontossági és dinamikai követelményeket, mégis mindenkit óva intünk attól, hogy a lineáris motorokat a pneumatikus hengerek kiváltására szolgáló eszköznek tekintse még akkor sem, ha ez bizonyos határokon belül műszaki szempontból igaz lehet.
A lineáris motorok alkalmazása olyan alkalmazásokban indokoltak, a pontossági és dinamikai követelményeket egyébként is szervomotorokkal oldanák meg, tehát az összehasonlításnak is csak ezekben az esetekben van értelme. Azt sem állítjuk, hogy a lineáris motorok minden pozicionálási feladatra korlátozás nélkül felhasználhatók, de motorokhoz paraméterei által megengedett felhasználási területeken védettségének, elektromos és mechanikai paramétereinek és nem utolsó sorban annak köszönhetően, hogy a Norgren MPAC lineáris hajtásrendszerei az egyenes vonalú mozgást közvetlenül állítják elő, méltó versenytársai lehetnek a hagyományos szervomotorokkal megvalósított lineáris hajtásoknak.